Nordic GPIO硬件原理与NCS应用详解
本文主题
- Nordic MCU的GPIO硬件简介、GPIOTE是什么、PPI是什么
- Zephyr中GPIO的使用、与外设引脚复用的方法(pinctrl)
声明:本文在解释硬件方面会比较详细,其目的是让读者在遇到问题时方便查阅,并debug底层寄存器信号。并非是推荐开发者直接进行寄存器开发,大多数情况下直接使用Nordic提供的外设API进行开发即可,可参考本文第3、4、5章。
1. GPIO硬件介绍
在介绍NCS中的GPIO和引脚复用(pinctrl)之前,有必要先介绍Nordic平台的GPIO相关硬件。
1.1. GPIO编号与分配表
每个Port上最多有32个GPIO,编号为0 ~ 31。Port从0开始,根据芯片封装的不同,可能还会有Port 1。例如,在代码中,P0.12对应的引脚编号就是12,而P1.12对应的引脚编号就是32+12,也就是44。
在每个手册的“Hardware and layout”章节,有不同MCU封装的GPIO功能说明,我们点进去可以看到每个引脚的用途。不仅是GPIO,还有一些电源和晶振引脚也包含其中:




这里面值得一提的一些信息有:
- 模拟引脚是固定的,标有Analog input的引脚才能作为模拟输入。
- 外设的数字引脚基本上是可以任意分配的。但有些外设会有推荐的引脚,例如上图中的QSPI。
- 某些引脚只能配置为Standard drive,无法作为高驱动模式。因此不适合高速数据传输的外设引脚。
1.2. GPIO硬件
下图来自于nRF52833 Product Specification。
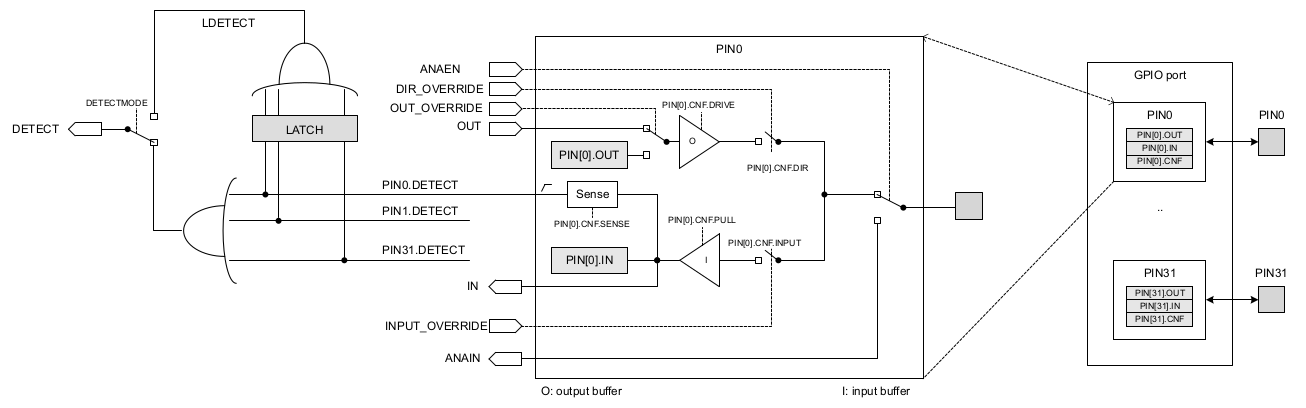
从框图可以看出,GPIO可以作为模拟输入,也可以作为数字输入和输出。
只有部分GPIO可以作为模拟输入,见1.2小节
寄存器介绍

Nordic平台的GPIO,每个port最多有32个引脚。
- OUT:32bit寄存器,bit写1使对应的GPIO输出高,写0使对应的GPIO输出低
- OUTSET:32bit寄存器,bit写1使对应的GPIO输出高,写0不影响对应的GPIO的状态
- OUTCLR:32bit寄存器,bit写1使对应的GPIO输出低,写0不影响对应的GPIO的状态
- IN:32bit寄存器,读取每个bit即为读取每个GPIO的状态
- DIR:32bit寄存器,bit写1使对应的GPIO配置为输出模式,写0使对应的GPIO配置为输入模式
- DIRSET:32bit寄存器,bit写1使对应的GPIO配置为输出模式,写0不影响对应的GPIO的模式
- DIRCLR:32bit寄存器,bit写1使对应的GPIO配置为输入模式,写0不影响对应的GPIO的模式
- LATCH:与休眠唤醒配置有关,见下方
- DETECTMODE:与休眠唤醒配置有关,见下方
- PIN_CONF:32个32bit寄存器。单独配置每个GPIO的输入输出(可覆盖DIR寄存器),输出模式、输出驱动能力、内部上下拉。
GPIO输出状态与驱动能力配置

我们知道GPIO的输出电路内部是两个MOS管作为开关,也就是说,GPIO其实有三种状态:
- 输出高电平:上管导通、下管关断。通常代表逻辑1。
- 输出低电平:上管关断,下管导通。通常代表逻辑0。
- 输出高阻态:上下管均关断。可以代表逻辑0或逻辑1,取决于电路设计者自身的定义。
但我们控制GPIO时,代码中只会写0和1两种状态。这就要求我们提前配置好GPIO的输出模式(推挽、漏极开路、源极开路),每一种都代表不同的高、低电平或高阻态的组合:

以上8种状态,包含了推挽、漏极开路、源极开路的状态。此外,当GPIO输出高电平或低电平时,还有标准驱动能力(Standard)和高驱动能力(High drive)两种选择。
举例来说,S0S1就是推挽(Push-Pull)输出;而S0D1就是开漏(Open-Drain)输出。我们知道开漏输出是为了做“线与”操作的,I2C协议就需要这种配置。同理,D0S1就是源极开路输出,可以实现“线或”操作。
线与:相连的GPIO中只要有一个输出低电平,则整个线保持低电平,且不能出现短路;
线或:相连的GPIO中只要有一个输出高电平,则整个线保持高电平,且不能出现短路。
这里除了标准驱动能力(Standard)之外,还有高驱动能力(High drive)可以选择。它相比于Standard可以输出更高的电流:

上图中,GPIO的Electrical specification章节记录了GPIO的电气特性。可以看到标准输出和高驱输出时,拉电流与灌电流的承受范围。
GPIO输出电压的变化,本质是给线上的等效电容充电或放电。因此GPIO输入输出电流的能力越强,则输出高频信号的能力越强。
GPIO数字输入
关于输入,值得一提的是Nordic的输入是可以断开的(从框图中也能看出)。因此只要不使能输入和输出,GPIO内部就是断开的,不用担心漏电导致功耗问题。
GPIO内部上拉/下拉电阻
导线高低电平的电磁学本质,是把导线和地平面之间看作一个微小的电容。输出高电平即为给电容充电,输出低电平即为给电容放电。
上/下拉电阻的作用是,当导线上的所有GPIO都处于高阻态时,通过这个上/下拉电阻给导线充、放电,使得导线的电平处于一个确定的状态。
例如I2C总线,线路上所有的IO都是开漏输出,因此需要一个上拉电阻。当所有IO都输出逻辑1(高阻态)时,能通过这个上拉电阻给导线电容充电,使得线路电平被拉高。
如果PCB上没有上拉电阻,就需要MCU配置内部上拉。配置相关的寄存器如下:

使用内部上拉时,需要注意电阻的阻值,典型值为13千欧。线路上的RC值影响线路上电平变化的速度。当无外挂电容,只考虑线路寄生电容时,使用此内部上拉电阻,I2C总线最高只能配置为100kbps。若想要配置到400kbps,请使用外部4.7千欧或更低的上拉电阻。

除了有提高电平变化速度的场景,还有需要降低电平变化速度的场景。例如,一些通过边沿触发的GPIO中断、或者Reset引脚的触发等。不要认为有了上拉电阻,线路的电压就会稳定不受干扰。因为如果线路上电容值很小,微小的电荷变化就会引起巨大的电压变化。因此线路要保持稳定的电平与上拉电阻关系不太大,反而与线路上的电容关系很大。
1.3. GPIO复用
Nordic平台的外设配置GPIO时,基本上是可以任意选择的。并且,外设的配置可以自动覆盖(Override)GPIO的输入输出方向、输出值等配置。见本文1.2.小节框图中的几个OVERRIDE信号。但是,GPIO的上下拉、输出模式等配置,还是要在GPIO的寄存器中进行配置。
数字复用
要配置一个外设所使用的GPIO,只需直接在这个外设对应的寄存器中进行配置。例如,下图是PWM外设中的PSEL(Pin Select)寄存器,就是可以选择任意一个port的任意一个pin作为输出引脚。当你在PWM外设的寄存器中配置引脚之后,会自动按照本文1.2小节框图中的OVERRIDE信号来覆盖对应GPIO的。

模拟复用
模拟复用不能选择任意的GPIO,只能选择具有Analog Input功能的GPIO。以SAADC为例,这里只能选择AINx或者内部VDD、内部VDD/5作为输入,而不是GPIO的引脚编号。

特殊GPIO(RESET和NFC Tag)
Nordic平台具有UICR寄存器,这是一个flash之外的掉电不丢失区域,用于存储一些用户配置,可擦写。其中具有RESET和NFC Tag引脚的配置,以52840为例:

nRF54L15的reset pin没有被分配GPIO编号。因此54L15的reset pin不能当作普通GPIO使用。

对于reset引脚来说,PSELRESET[0]和PSELRESET[1]的值都是PIN=18,PORT=0,CONNECT=0的情况下,P0.18才会作为Reset引脚使用。否则,P0.18作为普通GPIO使用。Reset信号无法映射到其他GPIO。
软件控制reset引脚作为普通GPIO使用:
在nRF5 SDK中,不要设置全局宏定义
CONFIG_GPIO_AS_PINRESET在NCS v2.5.0之后,需要在设备树overlay中增加:
2
3
4
5
6
7
8&uicr{
// Pin used as GPIO, not nRESET
/delete-property/ gpio-as-nreset;
};
&gpio0 {
/delete-property/ gpio-reserved-ranges;
};(在老版本NCS中是直接设置
CONFIG_GPIO_AS_PINRESET=n)
NFC引脚是固定的两个,对于nRF52833来说是P0.09和P0.10。默认情况下这两个IO是GPIO,只有UICR中对应的bit写1之后,这两个IO才能作为NFC来工作。
软件控制NFC引脚作为普通GPIO使用:
- 在nRF5 SDK中,在Keil/SES/Makefile中设置全局宏定义
CONFIG_NFCT_PINS_AS_GPIOS- 在NCS v2.5.0之后,需要在设备树overlay中增加:
2
3
4
5
6
7
8&uicr{
// Pin used as GPIO, not NFC
nfct-pins-as-gpios;
};
&gpio0 {
/delete-property/ gpio-reserved-ranges;
};添加后,系统启动时会自动擦写UICR并重启。
(在老版本NCS中是直接设置`CONFIG_NFCT_PINS_AS_GPIOS=y)
至于其他型号的MCU,注意看对应的uicr设备树compatible中规定了哪些值即可。
1.4. GPIO的Sense机制

从GPIO的框图中我们可以看出,每个GPIO在处于输入模式的情况下,有一个SENSE信号。它可以被每个引脚的PIN_CNF寄存器中对应的bit位控制。可以配置为高电平触发或低电平触发。

所有引脚的Sense信号会汇聚成一个DETECT信号。这个DETECT信号有两种作用:
- 使系统从System Off模式中唤醒(也就是GPIO唤醒休眠)
- 在GPIOTE外设中产生Port中断(后续在GPIOTE章节中介绍)
这个DETECT信号本身又有两种模式,通过DETECTMODE寄存器进行配置。
第一种是单纯的把所有引脚的PINx.DETECT信号进行逻辑或运算,也就是标准的DETECT信号。
另一种是在逻辑或之前加了一个锁存器(Latch),当PINx.DETECT置1时,相当于RS锁存器的Set端写1,LATCH寄存器中的对应Bit会被写1;当PINx.DETECT置0时,LATCH寄存器中的对应Bit会被锁存,不会变化。LATCH寄存器中对应的bit只有被CPU显式地写1时才会清0,相当于RS锁存器的Clear端写1。这个叫做LDETCT信号。
2. GPIOTE与PPI介绍
对于第一次接触Nordic平台的开发者,首先要明白一个概念:GPIOTE和GPIO是完全不同的外设。要理解为什么是这样,需要先理解Nordic外设接口(Peripheral interface)。
2.1. 外设接口(Peripheral interface)
在Nordic平台中,无论是什么外设,都遵循类似的外设接口,其框图如下:

整个框图代表外设,这个外设可以是Timer、串口、ADC等等。接下来详细解释内部框图的意思,框图中展示的都是所有外设都有的共通的部分。
TASK寄存器
TASK寄存器代表这个外设的输入。例如Timer计时的开始、结束、清零;ADC采样的开始、结束;串口的发送开始、结束等等。只要CPU给对应的TASK寄存器写1,外设就会去执行对应的动作。
EVENT寄存器与INTEN寄存器
EVENT寄存器代表这个外设的输出。例如串口DMA缓存接收满、ADC采样完成等等。这些事件(EVENT)可以用来触发CPU中断,只需要在INTEN寄存器中使能某个EVENT对应的中断,那么这个EVENT就能触发IRQ信号到NVIC模块。
SHORTS寄存器
Shorts意为短路。它可以让某个外设的EVENT自动触发自己的TASK,从而实现自动循环执行,无需CPU的干预。
这个短路路径是预设好的,固定的几条,不能自由搭配。以定时器为例:

定时器最多有6个比较(Compare)通道。当定时器中的count值增长到某个通道的compare值时,触发compare事件。这里可以通过使能对应的SHORT寄存器,让这个COMPARE EVENT去触发定时器的CLEAR TASK,从而实现自动循环计数。也可以让这个COMPARE EVENT去触发定时器的STOP TASK,从而实现单次计数。
这里是无法把compare event连接到start task的(虽然这种连接本身没有意义),因为SHORTS寄存器里的路径是预设好的。
2.2. PPI (Programmable Peripheral Interconnect)
在2.1章节中我们了解了外设的接口。从框图中可以看到TASK和EVENT寄存器上,还连接了PPI。这个PPI本身也是一个外设,它可以让你把一个外设的EVENT寄存器直接连接到另一个外设的TASK寄存器上,从而实现外设之间的自动联动,无需CPU参与处理。

图中的竖线,代表PPI的通道(Channel),nRF52833共有32条通道,其中前20条可以自由配置。每个通道可以连接1个EVENT,和2个TASK。(把EVENT寄存器的地址写入到CH[n].EEP寄存器;然后把想触发的TASK写到CH[n].TEP或者FORK[n].TEP中即可)。
举一个实际的例子,就是《Zephyr驱动与设备树实战——串口》中的提到高速异步串口:首先,Nordic的串口硬件具有DMA的功能,可以直接把数据从串口搬运到内存;然后,Nordic的串口驱动软件具有空闲计时的功能,当一定时间没有收到数据,DMA缓存还没存满的时候,就直接不等DMA中断了,直接产生串口回调函数,让CPU提前处理。
这里就产生了一个问题:此时DMA缓存未满,CPU只知道首地址,如何知道数据的长度呢?毕竟串口外设本身可没有计数功能。(RXD.AMOUNT寄存器只有DMA传输完毕才能读,这种提前读取的场景是不知道有多少的)。
一个纯软件的方法,就是每读到1个字节,就进入CPU中断,把一个变量+1。当传输完成时,读取这个变量,就知道一共收到了多少字节了。但是这种方法非常消耗CPU资源,且功耗高。当串口波特率达到921600时,CPU几乎无法做别的事情了。
Nordic的驱动代码采用的是PPI的方法。每收到一个字节(EVENTS_RXDRDY),就通过PPI让Timer的计数器+1(TASKS_COUNT)。等到传输完毕时,直接读取Timer的计数值即可。整个传输过程中CPU都处于休眠状态,只有串口、timer、总线、内存等在工作。从而实现高性能、低功耗。
同理,带有流控的串口发送也是如此。串口正在发送时,突然收到流控制停止发送的信号,这时串口DMA立即停止发送。当重新恢复发送时,如何知道该从第几个字节开始重新发?也是一样使用Timer进行计数。
PPI的使能与分组
PPI每个通道可以单独使能或关闭。通过CHEN寄存器写1使能,写0关闭。或者通过CHENSET和CHENCLR寄存器这种类似于SR锁存器的操作方式进行使能或关闭。
nRF52833的PPI外设还有6个通道组。每个通道组有32个bit,对应32条通道。只要某个Bit置1,那么对应的通道就会被包含在这个通道组里:


通道组的作用仅仅只是让你可以同时使能或者关闭一组通道。
固定的PPI通道
对于nRF52833来说,20~31号通道是不可编程的,它的连接是固定的。通常用于连接RADIO、加密、RTC等外设。Nordic提供的无线协议栈(例如SoftDevice蓝牙低功耗协议栈)内部会用到这些PPI。

分布式PPI(DPPI)
从nRF5340、nRF9160开始,Nordic内部的PPI升级为DPPI。从而把1对2的PPI通道升级为多对多的PPI通道。
每个外设的TASK寄存器会有对应的SUBSCRIBE(订阅)寄存器;EVENT寄存器会有对应的PUBLISH(发布)寄存器。通过发布-订阅不同的DPPI通道,实现了多对多的外设事件传输。
具体可以参考nRF5340或nRF9160的手册。
NCS中的PPI代码
前面都是讲解原理,比较详细。实际到NCS的代码中,PPI并不那么复杂。只需记住两个原则:
- NCS中无论是PPI还是DPPI,都被封装为gppi接口,因此开发者无需关注它们的区别;
- 永远不要自己指定某个具体的通道号来使用。因为Nordic的很多驱动代码里都用到了PPI,如果自己指定,很有可能和驱动中已经使用的通道冲突。因此我们应该用API来自动分配PPI通道,而不是自己指定。
1 | |
PPI例程位置:${NCS}/modules/hal/nordic/nrfx/samples/src/nrfx_gppi
2.3. GPIOTE (GPIO Tasks & Events)
GPIOTE和GPIO是不同的外设。通过第一章的介绍,我们知道GPIO作为输入输出,可以被CPU和其他外设使用。但是GPIO本身并不具有TASK和EVENT寄存器,因此无法与我们第二章介绍的PPI联动起来。
GPIOTE: Pin Task, Pin Event
GPIOTE也有很多通道(Channels),对于nRF52833来说有8个,每一个通道可以连接1个GPIO。给这个GPIO扩展出TASK和EVENT寄存器,分别是:
- TASKS_SET:使对应的GPIO输出高电平
- TASKS_CLR:使对应的GPIO输出低电平
- TASKS_OUT:使对应的GPIO输出一个预设的行为(在GPIOTE->CONFIG寄存器的POLARITY bits中配置,这个预设的行为可以是输出高、输出低、翻转)
- EVENTS_IN:当对应的GPIO检测到预设的波形时,产生一个EVENT(同样在GPIOTE->CONFIG寄存器的POLARITY bits中配置。这个预设的行为可以是上升沿、下降沿、双边沿)
你可以用这些通道连接一个具体的GPIO,这样,本来不能产生中断的GPIO就可以通过EVENT寄存器产生中断了。
要查看具体的代码,同样可以查看${NCS}/modules/hal/nordic/nrfx/samples/src/nrfx_gppi例程。注意到GPIOTE的通道也是一种可以分配的资源。和PPI类似,使用时,不要自己指定具体的通道号,而应该用
nrfx_gpiote_channel_alloc()函数来申请一个空闲的通道,以免和Nordic驱动代码中已经使用的GPIOTE通道冲突。
GPIOTE: Port Event
GPIOTE还有一个EVENT寄存器叫做EVENTS_PORT。在第一章节讲述GPIO时,提到GPIO有一个SENSE机制,全体GPIO的SENSE信号进行或运算后,会得到DETECT信号。
这里GPIOTE的EVENTS_PORT就是用来把这个DETECT信号变成一个Events寄存器,从而可以用来产生中断,或者连接PPI。
注意,DETCT信号虽然不是一个EVENT,但是DETECT信号本身就能把CPU从System Off模式唤醒,无需GPIOTE。
3. 在Zephyr系统中使用GPIO
前面两章详细介绍了GPIO、GPIOTE和PPI的硬件,目的是让开发者在遇到问题时可以知道该从哪里去Debug,该看什么寄存器。但在一开始软件开发时,不需要关心这么多细节。只需调用现成的驱动API即可。
3.1. 在Zephyr DeviceTree中配置GPIO
由于Zephyr所有硬件操作都在DeviceTree中完成,故需要先配置DeviceTree。下图演示了如何在一个node中写gpio:
1 | |
首先,由于GPIO的配置是一个属性,因此必须写在一个节点(Node)内,例如led_0内。
在《详解Zephyr设备树(DeviceTree)与驱动模型》一文中,我们知道DeviceTree的节点不能自己随便添加,每个节点都有对应的compatible,而compatible又必须有对应的Device Binding yaml文件,以及对应的驱动文件。现在问题是,如果我只想单纯的添加一个自由的GPIO,不使用任何led或者button驱动程序,该如何做?
你可以把gpio放在
/zephyr,user节点下。这是一个自由的节点,就是用来绕过Device Binding,专门放开发者一些自由的device tree属性的,想在里面写什么都可以。
2
3
4
5/{
zephyr,user{
my-gpios = <&gpio0 12 (GPIO_ACTIVE_HIGH|GPIO_PUSH_PULL|GPIO_PULL_DOWN)>;
};
};
然后是属性的名字,属性的名称必须以gpios结尾,也可以只写gpios。这样它才能被编译系统识别。
然后是属性的值,这是一个phandle-array类型的属性,可以写很多组。每个元素都是由三个部分组成:
- GPIO Controller:也就是我们俗称的port。这里可以直接引用label,例如
&gpio0。 - GPIO Pin Number:这个就是引脚编号。P0.12的编号就是12。
- GPIO配置:激活状态、输入输出、上下拉等等。可以在这里配置,也可以后续在应用代码里配置修改。
注意,部分开发者会有误解。
激活状态
GPIO_ACTIVE_LOW的意思是“逻辑1 = 低电平”;GPIO_ACTIVE_HIGH的意思是“逻辑1 = 高电平”。这是用于配置激活状态的参数,而不是部分人误解的配置默认输出高低电平的参数。
GPIO_ACTIVE_LOW常见于LED灯。因为MCU gpio灌电流能力比拉电流能力强,因此LED电路往往是电流流入GPIO,也就是“低电平 = LED灯亮”。
更多GPIO配置的参数选项,请参考文档:https://docs.zephyrproject.org/latest/hardware/peripherals/gpio.html
3.2. 在代码中控制GPIO
首先,需要在conf文件中使能GPIO的驱动(大多数例程都是默认使能的):
1 | |
在代码中,首先包含头文件:
1 | |
方式一:以gpio pin为对象进行控制
在main函数中创建一个gpio_dt_sepc结构体,这个是操作一个单独GPIO的句柄:
1 | |
- device tree中的内容都不可更改,故用cosnt变量存储最好
GPIO_DT_SPEC_GET()可以直接从device tree中读取到一个结构体的值- 第一个参数是node_id,由于我们放在
/zephyr,user节点下,故可以用绝对路径来指明这个节点,DT_PATH(zephyr_user)。其中逗号是名称的一部分,在C语言中要变成下划线,才能当作名称的一部分。 - 第二个参数是device tree的属性,也就是
my-gpios。在C语言中,-需要变成下划线。
然后就可以配置、读写该GPIO
1 | |
方式二:以gpio port为对象进行控制
使用port控制不需要像前面一样给单独的pin编写device tree,适合快速写一些测试用的代码。但它的缺点是,你使用的所有GPIO都不会在DeviceTree中有提示,如果有GPIO使用冲突,编译时无法帮你检查出来。
1 | |
更多API,请参考Zephyr GPIO文档。
配置GPIO的电流驱动能力
从第1章我们知道,Nordic MCU的IO口驱动能力是可以配置的,这个是Nordic独有的功能,与Zephyr无关,具体参数为:
1 | |
需要包含头文件,才可以使用这些参数
1 | |
3.3. 使用GPIO输入中断
使用GPIO输入中断也很简单,参考${NCS}/zephyr/samples/basic/button即可。具体步骤为:
1 | |
注意,不要真的拿这个代码去处理按钮。因为这个是最底层的GPIO中断,并没有按键消抖功能。
对于低功耗的按钮方案,需要触发GPIO中断,然后执行10ms的k_work进行去抖,最后再判定button是否按下。
Port中断与Pin中断
根据前面的硬件部分说明,GPIO的输入中断还分为Pin Event 和 Prot Event中断,代码上没有区别,设备树有区别。
当中断的检测方式是边沿检测时(触发方式包含GPIO_INT_EDGE,例如GPIO_INT_EDGE_TO_ACTIVE),才可以使用Port Event。
此时要修改设备树:
1 | |
在52840上,Port event比Pin event功耗更低,且会节省一个GPIOTE通道。但是理论上触发的延迟会高一些。
3.4. 注意开发板保留GPIO
Nordic开发板上某些GPIO已经被板载的外设使用了,所以,在开发板上这些引脚对应的GPIO插座是没有连接的。例如52840DK:

用于NFC的引脚以及用于QSPI Flash的引脚,在开发板上都被空焊盘断开了。这些信息也可以通过开发板背面的丝印示意图获得。
为了防止用户误使用这些GPIO,实际用示波器检测引脚又没有波形,浪费时间。Nordic在开发板的设备树中把这些引脚设为保留的(Reserved)。见gpio0或gpio1的设备树:
1 | |
这里的gpio-reserved-ranges,每个cell表示(gpio起始编号,gpio数量)的组合。以上赋值表示P0.00,P0.01,P0.06,P0.08~P0.10,P0.17~P0.23均为保留GPIO。
如果用户使用了这些引脚,将会出现Assert报错,从而提示用户:
1 | |
注意,这个保护是开发板的设备树才有的。如果你使用自定义boards,本身默认就没有配置
gpio-reserved-ranges。
如果开发者知晓自己在做什么,知晓如何控制这些GPIO,则开发者可以主动去除这一限制:
1 | |
3.5. GPIO配置示例
这里展示最复杂的情况,配置使用reset脚和NFC引脚当作gpio output使用:
设备树overlay:
1 | |
代码:
1 | |
实际测量时,注意开发板上的空焊盘。
4. 在Zephyr中分配外设引脚(pinctrl)
4.1. 把引脚分配给外设
从第一章我们知道,Nordic的引脚基本上可以任意分配给所有外设的。在Zephyr中,外设的引脚分配大部分使用pinctrl进行。
1 | |
每个外设的节点内部有pinctrl-0,pinctrl-1这样的属性,指向&pinctrl下的子节点。通常只有default和sleep两种状态,分别处于外设处于运行或休眠时的引脚状态。
Zephyr中的外设在main之前就已经被初始化。因此程序运行后,使用Zephyr驱动的外设无法
uninitial或disable,取而代之的是suspend和resume。
这个其实不用太深入理解,改引脚时照葫芦画瓢即可。例如,以上代码定义了两种状态,分别叫”default”和”sleep”,两种状态的GPIO配置并不相同。当外设休眠或唤醒时,这个外设的Zephyr驱动程序会自动把这一组引脚状态适用。
4.2. 外设引脚的驱动能力、上下拉、开漏推挽
只需注意,外设的引脚也是可以配置IO口电流驱动能力、上下拉的,例如:
1 | |
具体可配置的参数,大家可以Ctrl+鼠标左键,先跳转到pinctrl节点。然后再Ctrl+鼠标左键,点进”nordic,nrf-pinctrl”,查看DeviceBinding文件即可。


4.3. 注意Bootloader引脚
NCS支持MCUBOOT作为bootloader。MCUBOOT也会通过设备树来配置自己的外设引脚和GPIO。当系统上电后,先执行MCUBOOT,MCUBOOT也会初始化他自己的外设)。
当MCUBOOT跳转到APPLICATION时,它不会关闭自己开启的外设。这就导致一些配置可能并未重置。
最常见的是日志串口,MCUBOOT中的日志串口开启了流控,而APPLICATION的同一个串口未开启流控。这时,因为该UART的寄存器已经在bootloader阶段被配置,把对应GPIO配置成了流控引脚。导致到了Application阶段,流控引脚无法作为普通GPIO使用。
解决方案就是要确保bootloader的设备树和application的设备树一致。MCUBOOT的设备树可以在当前工程的”sysbuild/mcuboot/“下的相关配置文件中进行修改。
5. LED与Button库
前面都是GPIO的基础用法。如果你需要的只是驱动LED或者Button,可以直接使用Nordic现成的驱动API。
DK Library
这是Nordic为开发板(Development Kit)提供的一个简易的库,支持4个以内的LED和Button。其中Button已经做了去抖。
我们在开发板默认的Device Tree中看到的led和button节点就是为这个库服务的。许多简单的例程就是用它来控制GPIO。
1 | |
通用应用程序框架(Common Application Framework, CAF)
CAF是Nordic为商业级应用程序开发的一个框架库。里面有蓝牙、功耗管理、SMP DFU等等模组,其中当然也包含按钮和LED。
CAF: LEDS库提供了基本的GPIO LED和PWM LED功能,并且可以配置灯效。
CAF: Buttons库除了提供基本的Button去抖功能以外,还支持低功耗(不用时把按钮disable掉),并且支持矩阵键盘。
6. GPIO映射(GPIO nexus)
nRF52和nRF53系列的开发板上面的GPIO插座都是兼容Ardiono UNO接口的。
因此开发板的默认设备树中有默认定义,例如v3.0.0/zephyr/boards/nordic/nrf52840dk/nrf52840dk_nrf52840.dts:
1 | |
gpio-map规定了nRF52840的GPIO是如何映射到Arduino UNO接口的,基本规则为:
| Arduino引脚编号 | Arduino引脚配置 | nRF gpio controller | nRF引脚编号 | nRF引脚配置 |
|---|---|---|---|---|
| 0 | 0 | gpio0 | 3 | 0 |
| 1 | 0 | gpio0 | 4 | 0 |
| … | … | … | … | … |
#gpio-cells表示的是GPIO的设备树配置有几个uint32单元,这里的2就表示<0 0>这样的配置单元长度是2。在Zephyr中GPIO的配置基本都是2个单元,一个代表引脚号,一个代表配置的标志位(flags)。
gpio-map-mask:引脚映射时忽略一些特定的bit。比如,<&arduino_header 11 1>,在gpio-map中并没有映射吗,gpio-map中只有<11 0>。而gpio-map-mask会和这两个cell进行按位与运算,从而忽略最低的6个bit,将其全部变成0。于是就能匹配上<11 0 &gpio1 6 0>,从而知道是P1.06。
gpio-map-pass-thru:在引脚匹配完成之后,把之前忽略的引脚配置传递过去。也就是把最低6bit的引脚配置传递给nRF52的驱动。
为什么要有转接定义?举例来说,Nordic的nRF7002EK扩展板:
为什么这个扩展板可以同时兼容nRF52,nRF53和nRF91,而不用在乎这些开发板的引脚编号不同?
因为扩展板设备树的定义采用的是Arduino引脚编号。只要开发板上有Ardiono引脚定义,就可以实现兼容。见zephyr/boards/shields/nrf7002ek/nrf7002ek.overlay。
GPIO NEXUS的设计比较适合开发自己的模块的场景。你只需要定义自己的device tree bindings文件,就可以在设备树中定义自己的GPIO nexus节点。
自定义device tree bindings文件,位置在你的工程目录下,例如<my_project>/dts/bindings/xxxx.yaml。
其内容可以参考Ardiono转接头的定义,位于:v3.0.0/zephyr/dts/bindings/gpio/arduino-header-r3.yaml。
只要设备树和bindings文件的compatible相同,就会自动识别。
1 | |